【アーテックロボ】8軸2足歩行ロボットを作ったよ【プログラミング】
今回はアーテックロボの中のプログラムの一つである8軸二足歩行ロボットを作りました。
8軸2足歩行ロボットはアーテックロボの中でも2年目の最終段階で作るロボット。
ここまでたどり着くには2年間分のロボットを制作しないとたどり着けません。
8軸2足歩行ロボットを動かしてみよう!
ロボットといえば歩行型のロボット!アーテックロボでは二足歩行ロボや多足歩行ロボなどを作りますが、8軸2足歩行ロボは歩行ロボの中で最後に作るロボットです。
小学生にとっては制作するだけでも結構難しいロボットになります。
人のように歩行するロボットを作りたい
ロボットを人のように歩行させるにはどうすればいいの?
二足歩行ロボットはできても、中々人間と同じようにスムーズに歩く動きを作ることはできません。人と同じような動きにするにはモーターの数が多く必要です。
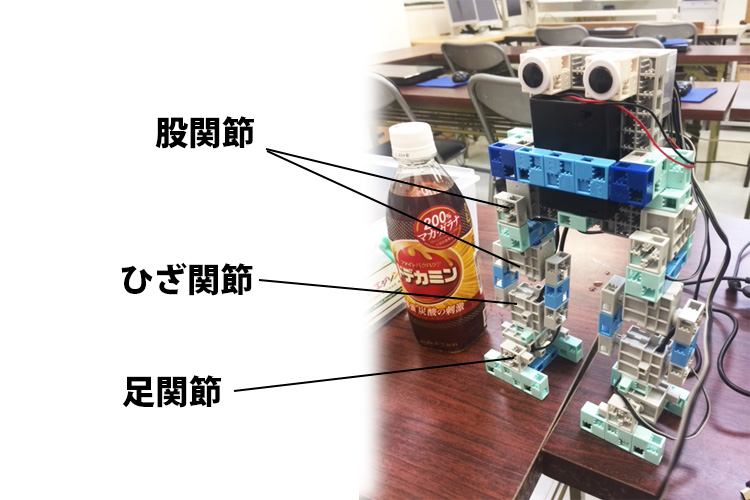
人の股関節、足関節は2つ以上の方向に曲がります。
アーテックロボのキットにはサーボモーターというモーターがあり、これが足の関節の役割を果たしています。ただの二足歩行ロボットの場合は、人間でいう場合の股関節と足関節の箇所にモーターを付けましたが、より自然な動きにするためには、もうひとつ関節を作る必要があります。
人間には、股関節、足関節のほかに、ひざ関節という部分があります。
この部分もロボットに追加することによって、もう少し自然な歩き方を作ることができるのです。
股関節、ひざ関節、足関節の3箇所をモーターで作ります。
片足に4つのサーボーモーターをつけて、両足で計8つのモーターをつける。
8つのモーターを使うので、8軸2足歩行ロボットという名前が付いています。
歩行ロボットはバランスを取るのが難しい!
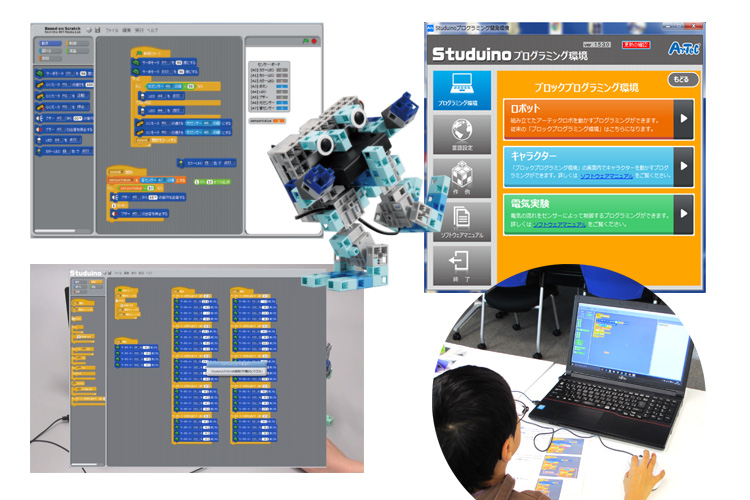
8軸2足歩行ロボットはプログラム自体はサーボモーターの角度を決めていくだけなのでシンプルなものです。右足と左足に付いているサーボモーターの角度をそれぞれ変えていき、歩く動きを作っていきます。
アーテックロボにはテストモードというモードがあり、これを使うことによってリアルタイムでロボットの足の動きを見ながら角度を変えていくことができます。
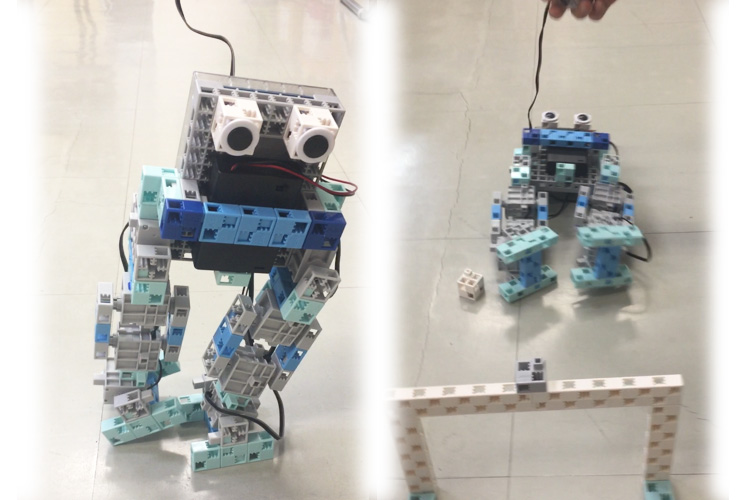
角度を決めたら歩かせよう!
実は角度をちゃんと決めたからといって、上手く歩くかといえばそうじゃない。
テキスト通りの角度を入れたからといって、上手く歩くかといえばそうじゃない。
実際歩かせてみると高確率でロボットは転びます。
まるで生まれたての子羊みたいに。
転んでしまったらどこかの角度が合っていないのかも!また調整!調整の繰り返し!
上手く歩かせることができたら最高です。
8時期二足歩行ロボットをもう少し変化させて、ボールを蹴る動作なんかも入れたりして
サッカーさせることも可能です♪
ここは新潟県長岡市にある小学生用の子ども向けプログラミング教室です。
「みんなのプログラミング教室 net」
アーテックロボを作ってみたい人はぜひお問い合わせを。

AI vs. 教科書が読めない子どもたち

関連記事



おすすめ記事一覧









