【ロボット】動物型多足歩行ロボットを作ろう【プログラミング】
今回は、アーテックブロックで多足歩行ができる動物のようなロボットを作りました。やっぱりロボットらしいロボットを作らないと楽しくありませんね!多足歩行ロボットは名前の通り、足が何本もあるロボットのことです。
ロボットを作ってみるとき、人間と同じ二足歩行、動物と同じ多足歩行があります。それぞれどんな風な機能を持って歩いているんでしょうか?
4足歩行の動物ってどうなっているの?

普段よく見る、犬や猫や馬、サバンナを駆け巡るライオンやハイエナ、シマウマ達、ありとあらゆる動物達の
中でよく見られるのが多足歩行です。人間のように二足歩行で生活している動物ってほとんどいませんよね。
もしかして多足歩行のほうが移動したり、歩いたり走ったりするのに便利なのでは!?
例えに馬の4足歩行を見てみましょう。4足歩行ってどうなっているの?
常足(なみあし)
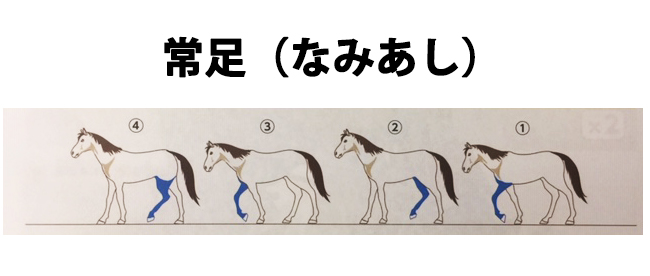
4足の足をバラバラに動かす歩き方で、常に2本もしくは3本の足が地面についている。
速足
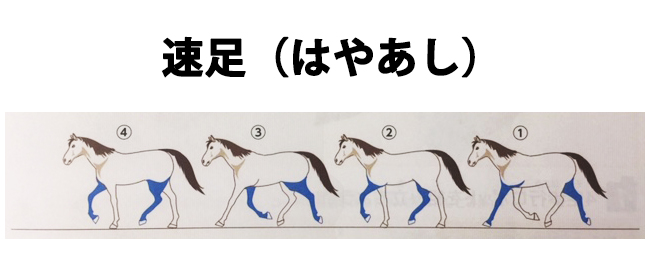
左の前後、右の前後をそろえて出す側対歩と右前足と左後足など、対角の足を同時に出す斜対歩がある。
図は斜対歩
駆け足

(跳躍)→右後足着地→右前足と左後足着地→左前足着地→跳躍の順で足を動かす。
襲歩
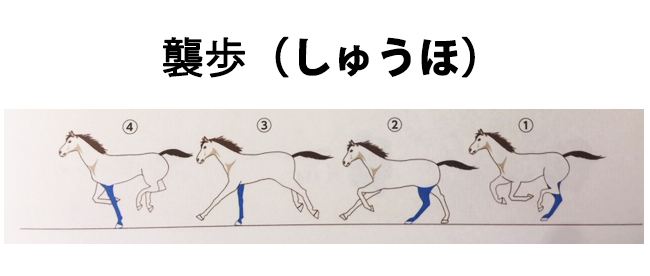
全速力で走る時の走り方で、右後足→左後足→右前足→左前足→の順で力強く地面を蹴る
普段は何気なく見ていた馬が歩いている、走っている姿も、種類分けしてみるとこんなふうに違いがあることがわかりますね!
馬は意識していなくても、4足歩行というものはこんなにも多様な動きがあったんです。
この動きをロボットにも合わせてあげれば、上手いこと動いてくれそうな予感がします。
人間が作るものはすべて、最初から自然界にあるんです!
関節を付けてあげよう

人間の手足が器用に曲がるのは関節のおかげです。それは馬や犬の足も同じです。
関節があるから柔軟な動きが可能になっているのです。ならばロボットにも関節を同じように付けてあげればいいんですね。
関節が少ないと、ロボットの歩きもぎこちなくなってしまいます。
関節の数を増やしてみましょう!
関節の代わりとなるのが、サーボモーターです。
アーテックロボの部品のひとつであるサーボモーターを関節代わりにして使ってみましょう。
足の動きはモーターの角度で決める
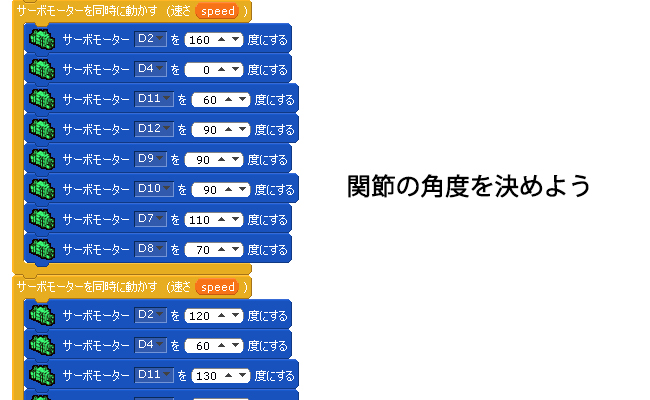
サーボモーターの角度で歩く動きを作っていきます。
それぞれのモーターの角度が何度なのかを、テストモードで決めていきましょう。
モーターの角度が決まったらプログラムを作り、動かしてみましょう!
ほら、出来上がり!
このロボットを作ることによって理解できることは、
動物の4足歩行はどんな状態になっているのか?
足に関節があることによってどんな動きができるのか?
モーターの角度を決めることによって、90度、180度、などの角度の理解
プログラムの作成、パソコンの基本操作
などを身につけることができますよ!
小学生にとっては一石二鳥、いや三鳥四鳥にもなりますね!
楽しくいろんなことが学べるアーテックロボをぜひ試してみましょう!
ここは新潟県長岡市にある小学生用の子ども向けプログラミング教室です。
「みんなのプログラミング教室 net」

アーテック (Artec) アーテックブロック バケツ ビビット 220ピース

関連記事


おすすめ記事一覧









