【プログラミング】昆虫型の多足歩行ロボットを作ろう【小学生】
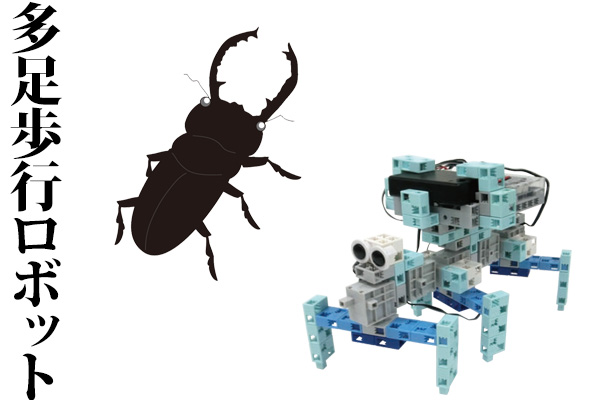
今回はアーテックロボの昆虫型多足歩行ロボットを作りました。多足歩行には動物型、昆虫型が用意されており、それぞれ実際の動物、昆虫の動きはどうなっているのか確認しながら作っていきます。
ロボットといえば、足があって、歩かせることが醍醐味!ぜひ昆虫型多足歩行ロボットを作って楽しみましょう。
災害救助ロボットって?
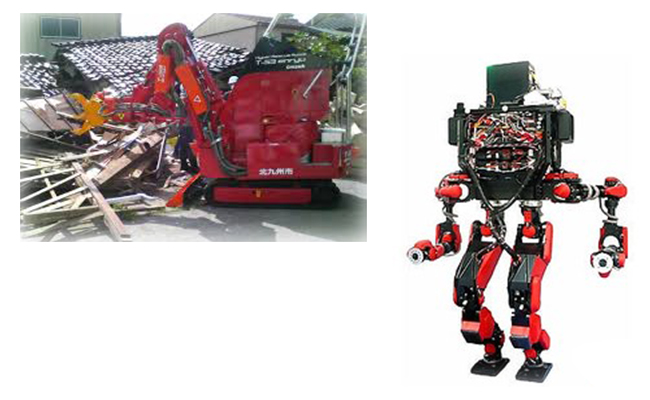
地震や津波、台風、がけ崩れなどの災害によって起こりうる救助活動。
瓦礫や足場の悪い場所、倒壊の危険性のある建物などによっては人が入り込めない場所もあります。
そこで、災害救助ロボットの出番というわけですね。
災害救助を行うレスキューロボットがあれば、二次災害などを防ぐこともできます。
日本ではレスキューロボットコンテストなるものも開催されており、新しい世代の技術者達が続々とロボット作りに励んでいます。
ロボットの移動方法は主に3つあるよ
移動するロボットと言っても、1種類だけではありません。それぞれの場所、環境によってメリット・デメリットを考えて選ばれてロボットは活躍しています。
車輪型
長所:制作が簡単。左右のタイヤの回転を調整するだけで進行方向がコントロールできる。
短所:整備された平らな道(整地)の走行は得意だが、でこぼこした道(不整地)や段差は苦手。
クローラ型

長所:でこぼこした道やちょっとした段差でも難なく走行できる。
短所:車輪型に比べると機構が複雑で重くなってしまうため、速い速度で走行できない。
歩行型
長所:整地・不整地関係なく移動できる。また移動に使わない足を別の作業に使うことができる。
短所:複数のモーターが必要となり、動かす順番や角度の調整などコントロールが複雑になる。
災害時の段差のあるデコボコした道などを移動しなければいけない場合、クローラ型や歩行型が有利なため、ほとんどのレスキューロボットではこのどちらかの方法が採用されています。
2本足よりも多足のほうが移動しやすい
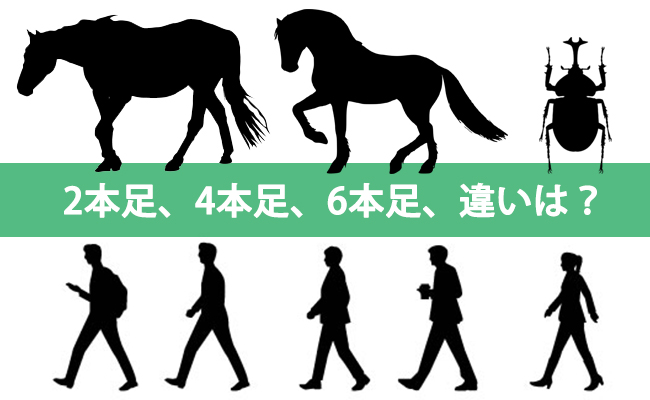
人間は2本の足で歩行しますが、多くの動物は4本足で歩行しています。
2本足で移動する場合、歩くときは1本の足のみで体全体を支えなければいけません。
しかし、4本足の動物では、1本の足を上げたとしても、残りの3本は地面についたままです。
当たり前ですが、こちらのほうが体を支えることに安定性をもたせることができます。
しかし、これをロボットに応用すると、足のぶんだけモーターやアクチュエーターが増えるため、エネルギー消費が足が少ないロボットよりも大きくなってしまい、稼働時間も短くなってしまいます。
そこで、自然界の動物や昆虫の歩行に注目して、できるだけ少ないエネルギーで移動ができるように研究が行われているのです。
ものを安定して立たせるにはどうしたらいい?
ここで疑問です。動物や昆虫や人間が安定して立つことができるのはどうしてでしょう?
身近にあるモノを使って見てみましょう。
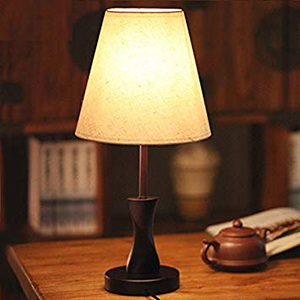
例えば「三脚カメラ」

名前の通り、足が3本ありますね。モノを安定して立たせる方法の1つとして、3点以上の足を使って立たせる方法があります。その1つの例が三脚です。
3つの足が必ず地面につくため、安定してカメラを立たせることができます。
足が4本ある椅子は?

椅子の4本脚は、脚の長さが全て同じなため、安定してバランス良く立たせることができます。1つでも脚の長さが違ってしまえば、それは椅子として機能しません。
1本脚で立たせるには?
1本の脚で立っているモノも沢山世の中には溢れています。
その方法としては、1本の脚の大きさを大きくすることです。
「点」ではなく、「面」によって体を支えれば1本でも立つことができるのです。
昆虫の「アリ」はどうやって歩いているの?
普段、地面に見かけるアリ。小学生なら必ずと言っていいほどアリと遊んだりしますね。
そのアリって、どうやって歩いているんでしょうか?
アリを含めて昆虫は、頭、胸、腹の3つの部位があり、足が6本あります。
6本の足は左右に3本ずつ分かれており、すべて胸から生えています。
昆虫はこの6本の足を順番に前に踏み出して歩行しています。
昆虫が速く歩くとき、「三脚歩行」
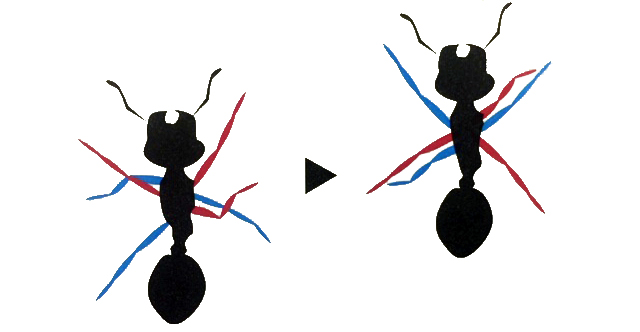
左右の3本の足を1つのセットにして、交互に前へ踏み出す歩き方。
3本の足を同時に浮かせている。
昆虫がゆっくり歩くとき、「波状歩行」
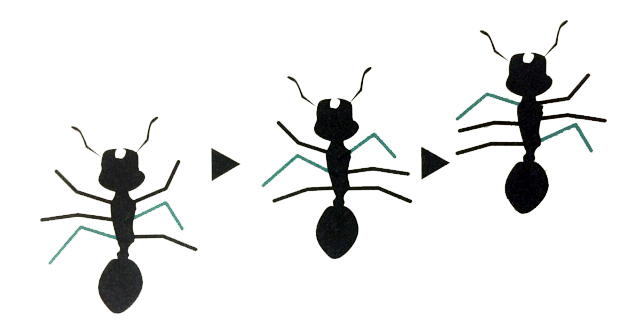
左右の足を後ろ足から前足へ順番に前に踏み出す歩き方。
2本の足を同時に浮かせている。
このアリの歩き方を真似てみれば、昆虫型のロボットも作れそうですね!
アーテックロボではサーボモータを使って足の角度をプログラミングで作って歩かせていきます。
ぜひアーテックロボで昆虫型の歩かせるロボットを作ってみましょう!
ここは新潟県長岡市にある小学生用の子ども向けプログラミング教室です。
「みんなのプログラミング教室 net」

アーテック (Artec) アーテックブロック バケツ ビビット 220ピース

関連記事



おすすめ記事一覧









