【プログラミング】二足歩行するロボットの仕組みって?【小学生】
今回はアーテックロボを使って、2本足で歩いていくロボットについて学んでいきます。2本足で歩くロボットは現代になった今でもあまり見かけませんが、日々研究が行われており技術はどんどん進歩しています。
近い未来、2本足のロボットが街なかを歩く姿が当たり前になるかもしれませんね。
その前に!アーテックロボでロボットの仕組みを理解してみましょう。
歩行ロボットの技術
2本足で歩く、人間。地球上で直立二足歩行をする動物は数多しといえどかなり少ない。
その中で最も上手く歩くことのできるのが人類です。私達が2本足で歩いていることは奇跡。
その奇跡をロボットで実現できないかと日々技術革新がめまぐるしい現代。
どんなロボットが登場しているのでしょうか?
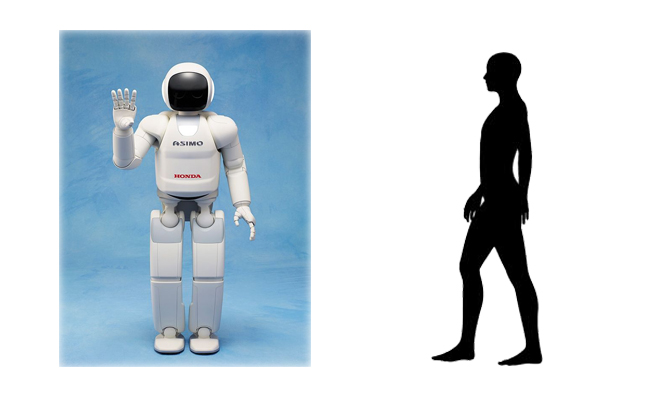
例えばホンダが開発したアシモは二足歩行ロボットでしたね。
ここ日本でも様々な2足歩行ロボットが作られているようです。
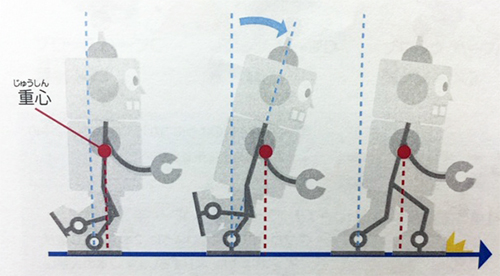
歩行ロボットで最も重要となるのが「重心」
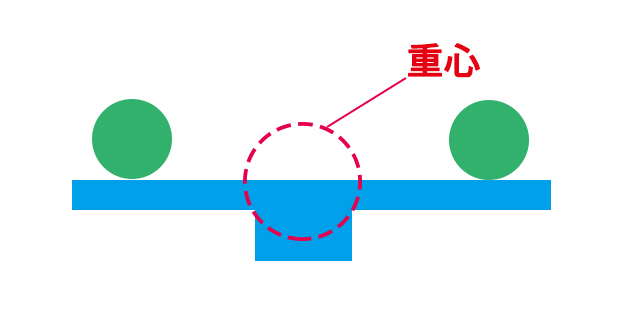
歩行ロボットを作る上で「重心」が要になってきます。
重心とは重力の中心という意味で、バランスが取れる点のことです。
公園にあるシーソーを思い浮かべてみてください。シーソーの重心は中央にあります。
ロボットの歩行「静歩行と動歩行」
2足歩行の移動には「静歩行」と「動歩行」の2種類があります。
「静歩行」
ロボットが倒れないように歩行させるには、上手く重心移動させて、常に重心の位置が地面についている足の上にある必要があります。
静歩行の長所:歩行動作を途中で止めても、転倒することがない。
静歩行の短所:歩行速度が遅い。ガタガタした路面や段差に弱い。足を大きくする必要がある。
これを「静歩行」といいます。この歩行方法だと、歩行中に止まっても倒れませんが、ゆっくりにしか動けません。
ガタガタした地面、段差に弱いのです。
「動歩行」
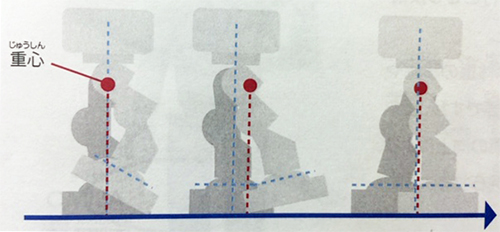
人間はどうして転倒せずに歩けるの?
私達人間が歩いているときは、実は「重心」は安定した位置からずれていて、一歩一歩倒れるように歩いているのです。
動歩行の長所:すばやく自然な動きができる
動歩行の短所:バランスを崩しやすいため、ロボットで実現するにはとても複雑な制御が必要
この「動歩行」を利用すれば、ロボットが二足歩行することが可能なのです。
二足歩行ロボットの実用化

そもそも二足歩行ロボットは一体なんのために作られているのでしょうか?
それは人間と同じように動作してくれて、人間の代わりの動きができるようになってほしい、
という願望のもとでしょうか。
しかしながら現時点ではまだまだ二足歩行ロボットが実用化、一般化されることは難しく、
21世紀の今でもそれは実現されていません。
現に災害時などでかつて日本が誇っていた二足歩行ロボットの技術が活躍することはなかったといいます。
ASHIMO以降、新たな二足歩行ロボットの名は日本からは出てきていませんね。
ボストン・ダイナミクスのAtlas(アトラス)
アメリカにあるロボット会社ボストン・ダイナミクスが国防高等研究計画局(DARPA)の元で開発したAtlas(アトラス)という二足歩行ロボットが近年注目されています。
このアトラス君は、人間よりも速く走ることができ、障害物を避けたり、段差のあるところをジャンプしたりする優れものです。
もはや人間よりも動きは俊敏かもしれません。
ボストン・ダイナミクス社は次々と新しいロボットを開発中。
こちらは犬型のロボット「Spot Mini(スポットミニ)」
まるでどこかのゲームに登場しそうなモノがすでにアメリカでは実現しているのです。
このボストン・ダイナミクス社は日本のソフトバンクが買収したことで話題になりました。
日本でもこういったロボットが当たり前のように活躍する日が近いかもしれませんね!
こういったロボット達、あなたなら「何に」使いますか?
二足歩行ロボットが当たり前のように近くにいる未来まで、、、あと何年!?
ここは新潟県長岡市にある小学生用の子ども向けプログラミング教室です。
「みんなのプログラミング教室 net」
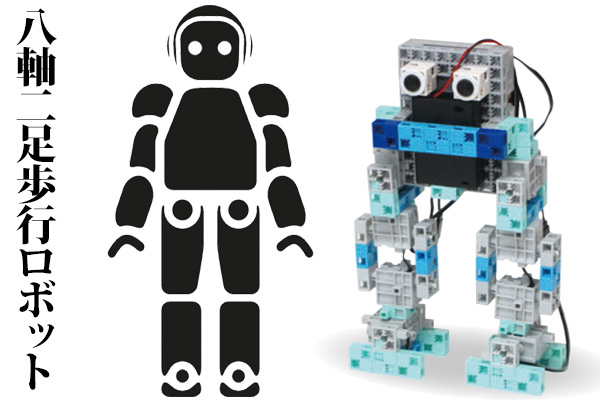
小学生でも作れるロボット!ぜひ一緒に、二足歩行ロボットを作りませんか?

アーテック (Artec) アーテックブロック バケツ ビビット 220ピース

関連記事



おすすめ記事一覧









